标定之相机的内参和外参
本文共 585 字,大约阅读时间需要 1 分钟。
我理解错了,相机内参矩阵和相机畸变参数是两个东西,而且好像实际pnp好像没有用到相机的外参矩阵。
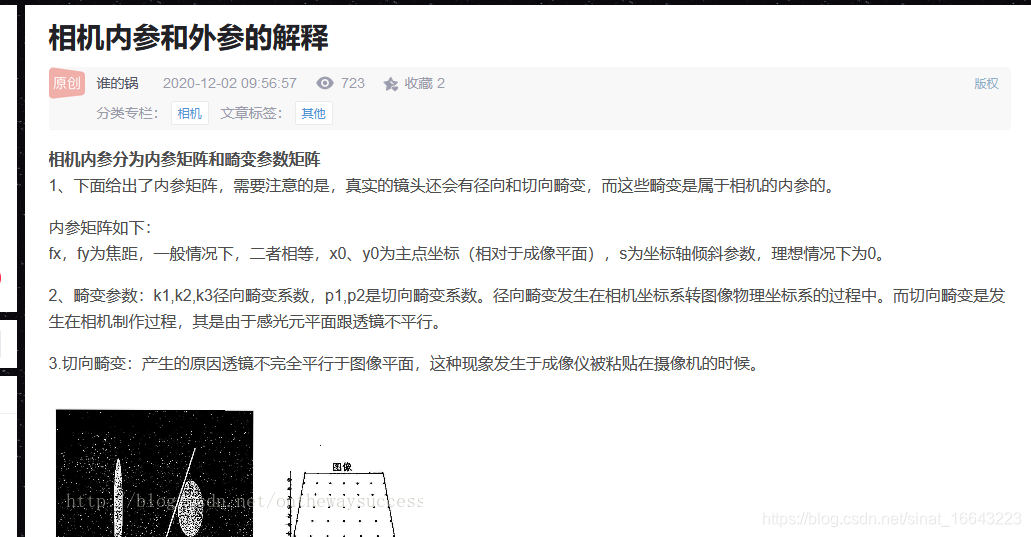
内参我觉得主要就是指畸变参数。畸变又分为径向和切向畸变。畸变应该是比较好理解的对吧。
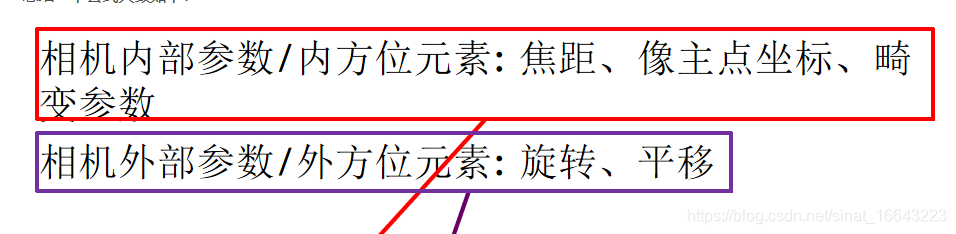
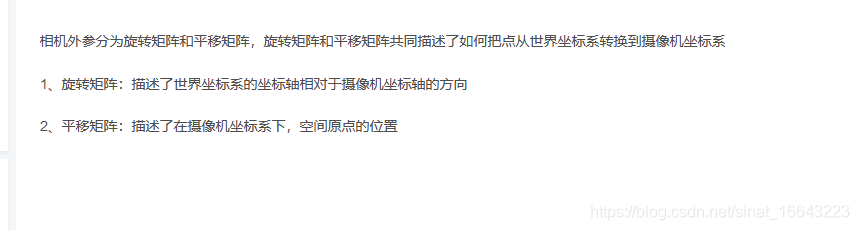
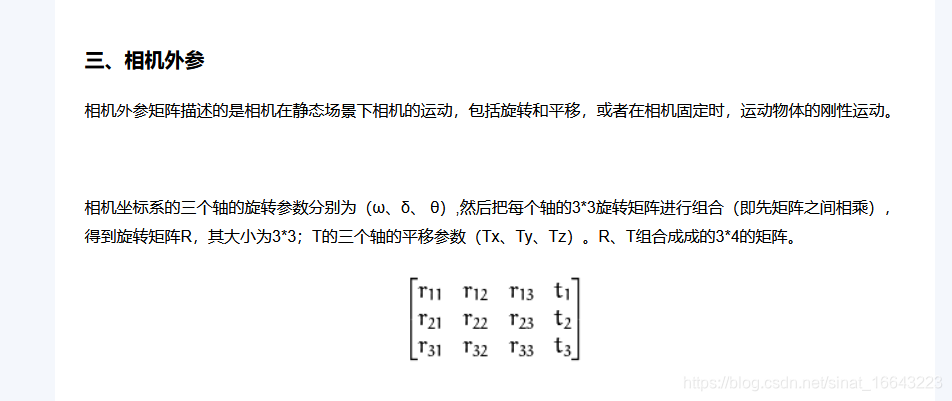
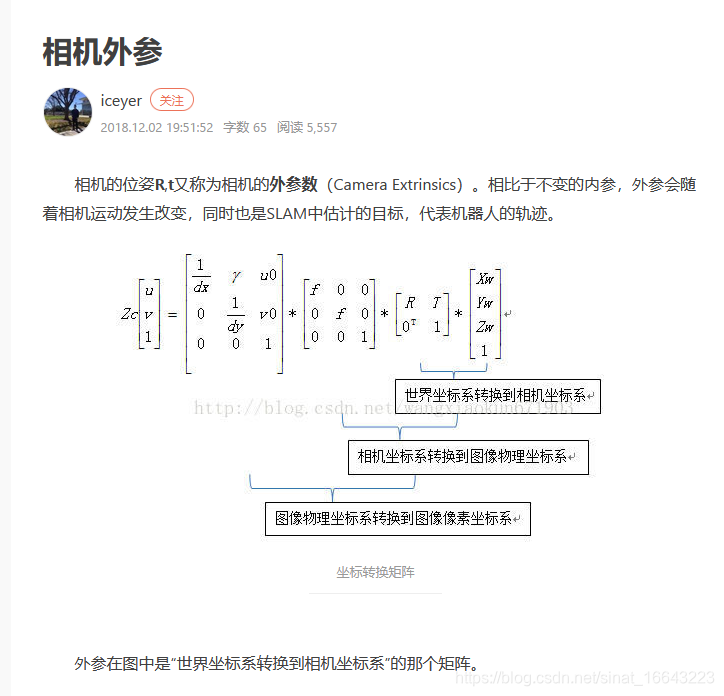
外参呢,就是平移矩阵和旋转矩阵,两个坐标系之间的关系就可以用平移矩阵加旋转矩阵描述嘛,和tf一样,这个我之前总结过对吧。

那我们标定的时候,标定板
相机外参难道是这个意思?
相机外参似乎就是相机的位姿啊,相机外参是相机外部参数啊,相机外参不就是我们要求的相机位置么!!!!!!!!!!!!!!!!

是不是已知内参其他几个参数可以求外参就是pnp?
标定是已知几个求相机内参?
我们这么想想,标定是不是已经知道特征点现实世界的三维坐标了,因为知道那些方格子的边长了嘛,而且知道像素点坐标。

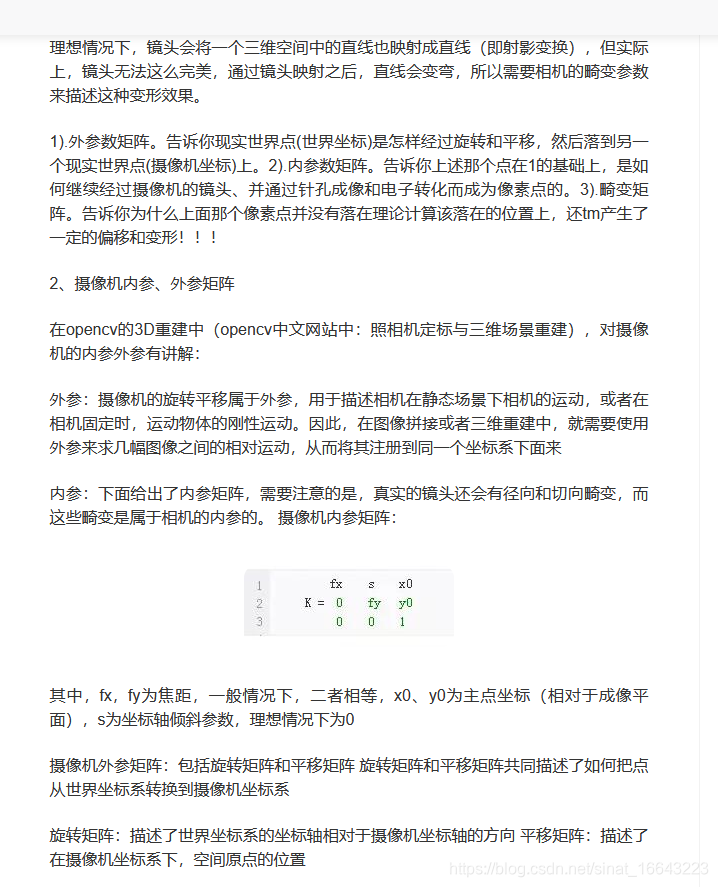
这里说了相机内参包括内参矩阵和畸变参数矩阵!!!!!这样就好理解说得通了。
也好理解ROS下标定就得到内参矩阵和畸变参数就可以了。做pnp也是用内参矩阵和标定参数就可以了。并没有外参。
只要获得 特征点的世界坐标(三维坐标)、2D坐标(像素坐标)、相机内参矩阵、相机畸变参数矩阵 以上四个参数即可以解得相机与标志物之间的外参(R旋转矩阵、T位置矩阵)
再回看这句话是不是有感觉了,这里都明确说了,是得到相机的外参!!!!!!!!
这个opencv里的标定程序明确说了就是计算相机内参矩阵和畸变系数。

转载地址:http://zmmni.baihongyu.com/
你可能感兴趣的文章
read humor_campus
查看>>
IBM WebSphere Commerce Analyzer
查看>>
Unix + OS IBM Aix FTP / wu-ftp / proftp
查看>>
my read work
查看>>
db db2 base / instance database tablespace container
查看>>
hd disk / disk raid / disk io / iops / iostat / iowait / iotop / iometer
查看>>
project ASP.NET
查看>>
db db2_monitorTool IBM Rational Performace Tester
查看>>
OS + Unix Aix telnet
查看>>
IBM Lotus
查看>>
Linux +Win LAMPP Tools XAMPP 1.7.3 / 5.6.3
查看>>
my read_university
查看>>
network manager
查看>>
OS + Linux Disk disk lvm / disk partition / disk mount / disk io
查看>>
RedHat + OS CPU、MEM、DISK
查看>>
net TCP/IP / TIME_WAIT / tcpip / iperf / cain
查看>>
webServer kzserver/1.0.0
查看>>
OS + Unix IBM Aix basic / topas / nmon / filemon / vmstat / iostat / sysstat/sar
查看>>
my ReadMap subway / metro / map / ditie / gaotie / traffic / jiaotong
查看>>
OS + Linux DNS Server Bind
查看>>